国内首次实现机器人关节抗冲击、能量回收及多样性刚度能力

高精度
关节力矩估计方法
外力估计误差降低23%

变刚度自适应
变阻抗柔顺控制技术
实现意外情况下的柔顺保护

低成本自适应
解决方案
关节成本大幅下降

关节能量回收与
高效储能电路
能耗减小31.2%
高精度
关节力矩估计方法
外力估计误差降低23%
低成本自适应
解决方案
关节成本大幅下降

变刚度自适应
变阻抗柔顺控制技术
实现意外情况下的柔顺保护
关节能量回收与
高效储能电路
能耗减小31.2%
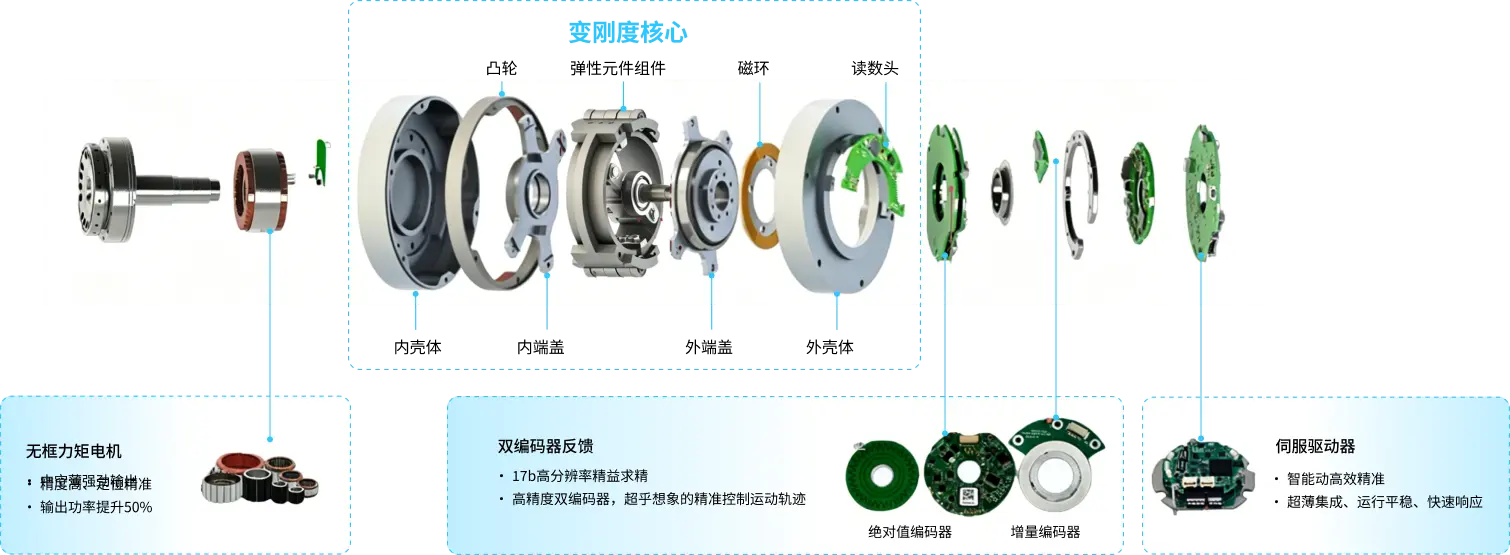
重构高性能运动执行的底层能力
集成驱动、感知与柔顺控制的一体化系统,为下一代机器人提供更轻、更稳、更智能的关节解决方案

一体化 · 轻量化架构
- 集减速器、无框力矩电机、伺服驱动器、弹性体与绝对值编码器于一体,实现高度紧凑的结构设计与快速部署能力
- 适用于重量敏感型应用的全尺寸解决方案

抗冲击 · 被动柔顺缓冲
- 输出端集成弹性体结构,实现无延迟被动顺应
- 可有效吸收并缓冲高频冲击载荷,提升系统稳定性与耐久性

力感知 · 精准闭环控制
- 双绝对值编码器集成设计,实现高精度位置与扭矩反馈
- 支持更精细的力控制,实现主动柔顺伺服控制能力

能量回收 · 动态效率优化
- 在小范围往复运动中,弹性体实现能量储存与释放闭环
- 有效降低循环损耗,提升整体能效表现

多刚度系统 · 自适应输出能力
- 支持恒定刚度 / 非线性刚度 / 可调刚度多模式输出
性能跃迁,突破关节控制边界
刚度调节范围
3.5×提升
刚度响应速度
4.3×提升
多刚度模式
3种控制形态
系统集成度
五合一一体化架构
关键参数
产品型号(星辰系列)
FJPG-18
FJPG-30
FJPG-50
减速比
9.67
9.25
28.13
额定转速(rpm)
310
160
100
额定扭矩(Nm)
6
10
16
峰值扭矩(Nm)
18
30
50
平面扭簧刚度(Nm/°)
0.5~2.5
0.5~3
0.5~4
重量(kg)
0.8
1.5
1.8
供电(M)
15~48
反馈形式
双绝对值编码器
通讯接口
EtherCAT/CAN通讯
产品型号(泰坦系列)
FJCG-50
FJCG-52
FJCG-75
减速比
25
39
25
额定转速(rpm)
120
48
60
额定扭矩(Nm)
10
20
25
峰值扭矩(Nm)
50
52
75
平面扭簧刚度(Nm/°)
0.5~4
0.5~4
0.5~5
重量(kg)
1.2
1.5
1.5
供电(M)
15~48
反馈形式
双绝对值编码器
通讯接口
EtherCAT/CAN通讯