产品与服务
技术解决方案
生态合作
关于航墨
招贤纳士
“凌鲸”系列工业机器人
精研力控技术,夯实智造底座
联系我们
→
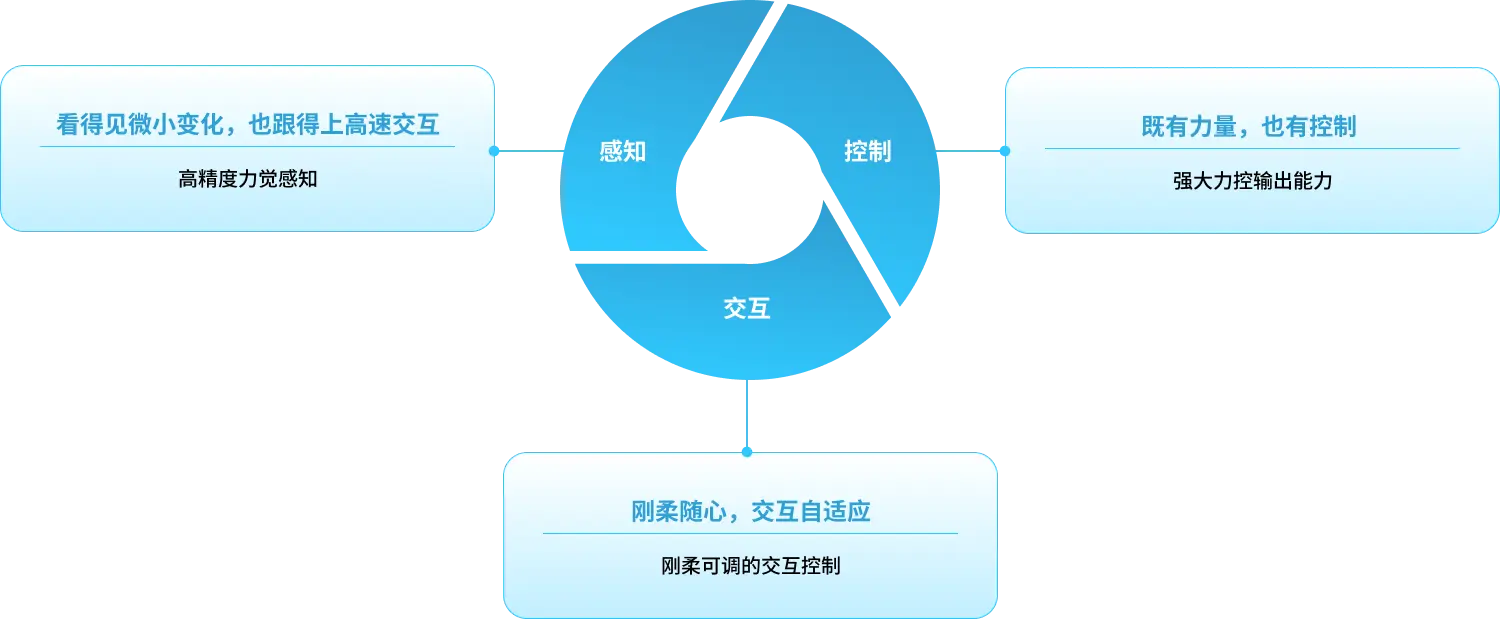
从视觉驱动到力觉驱动的范式升级
实现从“感知→控制→交互”的全链路力控闭环
实力参数·全维呈现
参数名称
典型值
说明
自由度
7
冗余自由度,增强避障和灵巧操作能力。
工作半径
1200mm
覆盖典型工作台范围。
工作负载
10kg
在末端最高速下的标称负载。
最大负载
15kg
在低速下可安全搬运的负载。
末端重复定位精度
±0.02mm
纯位置模式下的超高精度。
工具端最大速度
3.5m/s
高动态运动能力
处理不确定、非结构化、需要手感的真实世界任务
工业
消费
医疗
农业
特种作业